C++ Module: polyhedralGravityModel
Executive Summary
This module encodes the polyhedron gravity model as described in Werner and Scheeres 1996. It inherits from the abstract class gravityModel and computes the gravity acceleration and potential with the constant density polyhedron equations.
The gravity acceleration is evaluated as
and the gravity potential as
Module Assumptions and Limitations
The evaluation point is referred to geographical coordinates with respect to the polyhedron gravity body. In other words, the input position is expressed in the planet centred rotating frame. The output gravity acceleration is also expressed in the previous frame.
The module assumes the polyhedron body has constant density.
The polyhedron shape is defined by triangular faces.
The module requires the standard gravity parameter to be provided by the user. Then, the body volume is internally computed from the polyhedron data to ensure consistency with the shape.
Detailed Module Description
The polyhedralGravityModel module handles the following behavior:
Vertexes positions and faces indexes (corresponding to vertexes) are loaded from a polyhedron shape file.
The module initializes and stores all the variables that have no dependency with the evaluation point: edge-facet dyad matrices, facet normals, facet centers and length of edges.
By looping over edges and faces at the same time, the gravity acceleration and potential can be computed for an evaluation point.
User Guide
To use the polyhedron gravity model, instantiate the simIncludeGravBody.gravBodyFactory() and use the corresponding method to create a custom gravity body (Eros in this example). Then, use the gravity body method to attach a polyhedron gravity model and set the path to the polyhedron shape file as input argument.
mu = 4.46275472004 * 1e5 # Eros standard gravity parameter
file_poly = 'eros007790.tab' # Path to a shape file of Eros
gravFactory = simIncludeGravBody.gravBodyFactory() # Instantiate gravity factory
erosGravBody = gravFactory.createCustomGravObject('eros_poly', mu=mu) # Create Eros gravity body
erosGravBody.isCentralBody = True # (Optional) If the body is to be central
erosGravBody.usePolyhedralGravityModel(file_poly) # Declare the use of a polyhedron model for Eros and set the shape file
For orbital propagation, the list of gravity bodies have to be appended to a spacecraft as
scObject = spacecraft.Spacecraft() # Creates spacecraft instance
scObject.gravField.gravBodies = spacecraft.GravBodyVector(list(gravFactory.gravBodies.values())) # Attach list of created gravity bodies to spacecraft
For gravity evaluations, the polyhedron gravity has to be initialized
erosGravBody.initializeParameters() # Initializes polyhedron module internal variables
pos = [40*1e3, 30*1e3, 10*1e3] # Evaluation point
acc = erosGravBody.computeField(pos) # Gravity evaluation
Supported polyhedron shape files
Polyhedron shape files contain vertexes coordinates and the vertexes indexes that form each triangular face. The vertexes coordinates are assumed to be expressed in kilometers. The following file formats .tab, .obj and .txt are supported as inputs:
The .tab files do not have a header and have 4 columns where the first one denotes if the row refers to a vertex (v) coordinates or the face (f) composed of three vertexes
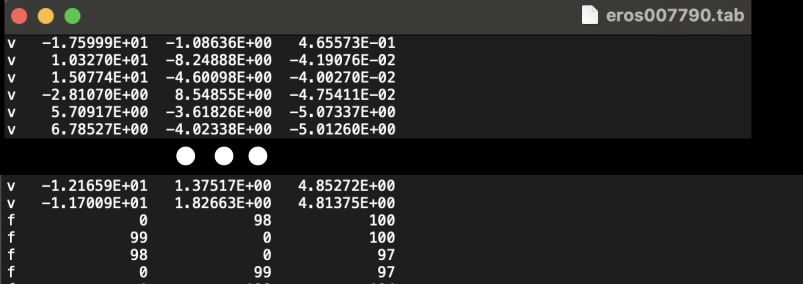
Figure 1: Example of .tab polyhedron shape file
The .obj files content is equivalent to the .tab extension but they admit comments (#) and separate the vertexes and faces content with an empty line
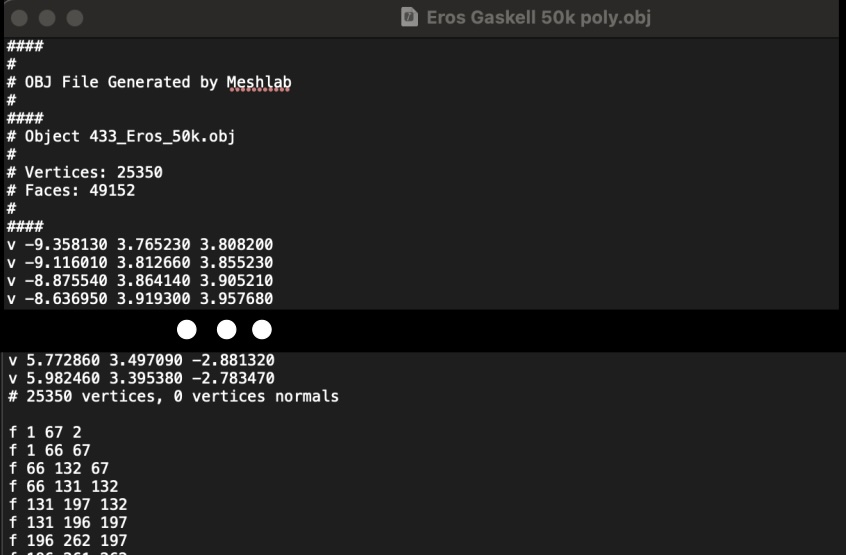
Figure 2: Example of .obj polyhedron shape file
The .txt file has a first line as a header where the number of vertexes (first column) and faces (second column) are indicated. Then, it has 3 columns where vertexes coordinates and subsequently the faces correspondence with vertexes are provided
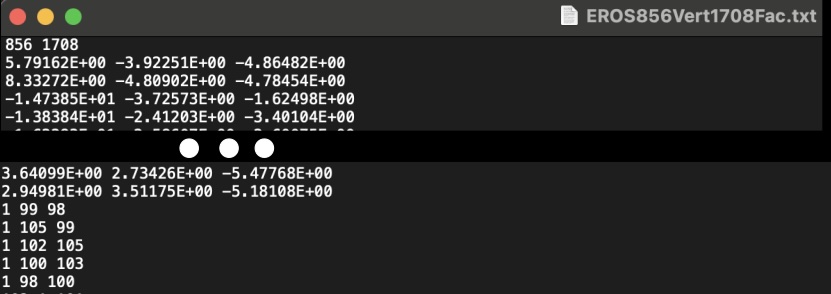
Figure 3: Example of .txt polyhedron shape file
Additional file formats could be added to the function loadPolyFromFileToList(fileName: str) under gravCoeffOpps.py.
-
class PolyhedralGravityModel : public GravityModel
- #include <polyhedralGravityModel.h>
The Polyhedral gravity model.
In this class, a polyhedron is defined by its triangular facets. Each facet is defined by three vertices (they are triangles), and each vertex is defined by its position relative to the center of mass of the body.
Public Functions
-
std::optional<std::string> initializeParameters() override
Initialize all parameters necessary for the computation of gravity.
The attribute
muBodymust be set separately.Will return an error message (string) if
xyzVertexororderFacetwere not set. Otherwise, returns an empty optional.
-
std::optional<std::string> initializeParameters(const GravBodyData&) override
Initialize all parameters necessary for the computation of gravity.
The attribute
muBodyis read from the givenGravBodyData.Will return an error message (string) if
xyzVertexororderFacetwere not set. Otherwise, returns an empty optional.
-
Eigen::Vector3d computeField(const Eigen::Vector3d &pos_BP_P) const override
Returns the gravity acceleration at a position around this body.
The position is given in the gravity body-centred rotating reference frame. Likewise, the resulting acceleration is obtained in the gravity body-centred rotating reference frame
-
double computePotentialEnergy(const Eigen::Vector3d &pos_BP_P) const override
Returns the gravitational potential energy at a position around this body.
The position is given in the body-centred rotating reference frame.
-
inline bool dependsOnOrientation() const override
Always returns true: the field is evaluated from the body’s facet geometry in the body-centred rotating frame, so it depends on the body orientation.
A polyhedral model represents an irregular (generally non-axisymmetric) shape, so the body orientation must be known to evaluate the field correctly. Without a planet-orientation message the body is treated as non-rotating, which produces spurious results (issue #1352).
Public Members
-
double muBody = 0
[m^3/s^2] Gravitation parameter for the planet
-
Eigen::MatrixX3d xyzVertex
This matrix contains the position of every vertex of this polyhedron, in meters. Each row corresponds to a different vertex, while each column corresponds to x, y, z respectively.
-
Eigen::MatrixX3i orderFacet
This matrix defines the facets of the matrix. Each row contains three numbers, each of them corresponding to the index of a vertex, as defined in xyzVertex. These three vertices define a single facet of the polyhedron.
Note that the order of the vertex index is important: the facets must all be outward pointing.
-
std::optional<std::string> initializeParameters() override